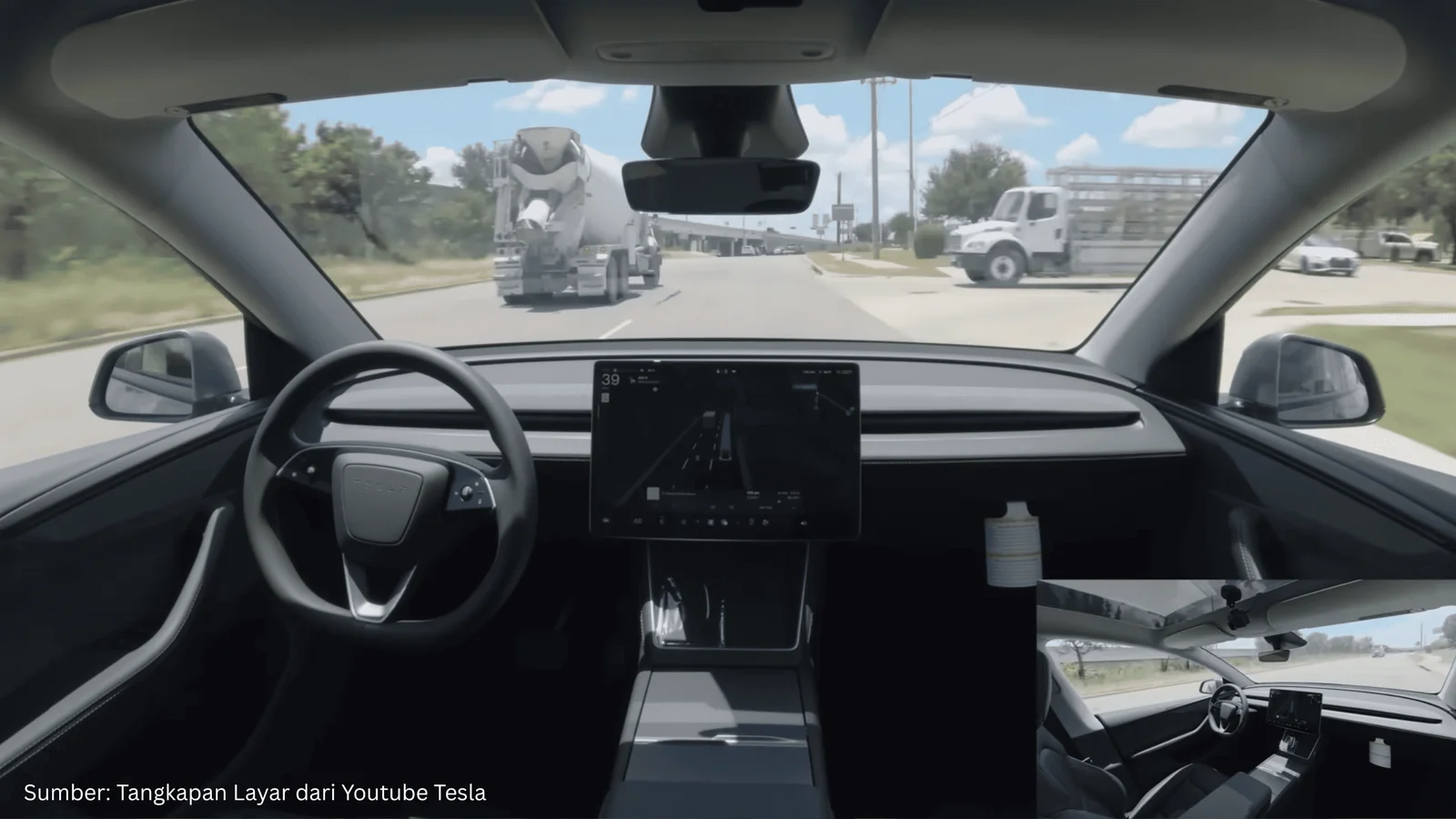
Jalanan dari Gigafactory Texas menjadi saksi sebuah kendaraan otonom Tesla Model Y yang berhasil tiba dengan selamat di garasi pelanggan pada 28 Juni 2025 silam. Uniknya, kendaraan otonom atau self-driving car yang digunakan Tesla ini tidak memakai teknologi LiDAR.
Tesla secara tegas memilih untuk tidak menggunakan teknologi LiDAR. Keputusan ini berakar dari filosofi dan pendekatan unik yang dianut oleh perusahaan, khususnya oleh CEO Elon Musk, yang sejak awal percaya bahwa mobil otonom seharusnya bisa beroperasi hanya dengan kamera dan kecerdasan buatan (AI), tanpa perlu bergantung pada sensor jarak, seperti LiDAR.
Musk mengatakan bahwa cara kerja manusia dalam mengemudi seharusnya dapat direplikasi oleh teknologi. Oleh karena itu, Tesla berupaya mengembangkan sistem full self-driving (FSD) yang sepenuhnya berbasis kamera dan pemrosesan visual melalui neural network.
Pendekatan itu disebut sebagai vision-based autonomy, yang berarti kendaraan hanya perlu mempunyai visi atau penglihatan di sekitarnya dengan menggunakan kamera. Nantinya, visi tersebut digunakan untuk memahami dan merespons lingkungan melalui pembelajaran mesin dan pemrosesan data visual tingkat tinggi.
Selain alasan filosofis, Tesla juga menilai bahwa penggunaan LiDAR dapat menambah kompleksitas dan ketergantungan sistem kendaraan otonom. Bila data dari kamera dan LiDAR bertentangan, sistem akan dihadapkan pada dilema dalam mengambil keputusan. Tesla lebih memilih membangun sistem yang konsisten dan terintegrasi dalam satu pendekatan utama, yakni penglihatan visual, ketimbang mengandalkan sensor fusi seperti yang dilakukan oleh perusahaan lain.
Dari sisi biaya, LiDAR masih tergolong mahal dan kurang efisien untuk digunakan secara massal. Tesla menargetkan mobil otonom yang bisa diproduksi dalam skala besar dan terjangkau bagi konsumen umum. Oleh karena itu, ketergantungan pada teknologi mahal seperti LiDAR dianggap bertentangan dengan visi perusahaan untuk menciptakan solusi mobilitas otonom yang ekonomis.
Tesla juga berpendapat bahwa LiDAR memiliki keterbatasan di dunia nyata. Sensor ini mungkin kurang efektif dalam kondisi cuaca buruk, seperti hujan lebat atau salju tebal, dan tidak memiliki kemampuan memahami makna visual secara semantik. Misalnya, LiDAR tidak bisa mengenali bahwa warna merah di lampu lalu lintas berarti kendaraan harus berhenti. Sebaliknya, kamera dapat memahami konteks visual dengan lebih baik.
Dengan pendekatan ini, Tesla berupaya melatih jaringan neural miliknya berdasarkan miliaran kilometer data yang dikumpulkan dari kendaraan-kendaraan Tesla yang sudah beroperasi di seluruh dunia. Data ini digunakan untuk terus meningkatkan kemampuan mobil dalam mengenali dan merespons berbagai situasi di jalan raya. Tesla juga mengembangkan sistem superkomputer Dojo untuk mempercepat pelatihan AI dalam memahami data visual tersebut.